考研数学题集
数学模拟卷张宇8套卷二2 12 20 21(3)
不可导点集中在$x=1,x=2,x=3$需要用$x^2+ax+b$把它们消掉
令$x=t+ {\frac{\pi}{2}}$
根据$|f’(x)|\leq{M}$推测需要用到泰勒展开,直接展开$f(x)$不太够,所以对$\int_a^xf(t)dt$和$\int_x^bf(t)dt$泰勒展开
$r(A^TA)=r(A)且Ax=0的解也是A^TAx=0的解,所以A^TAx=0与Ax=0同解$
卷三 2 18
间断点处分母为0
尝试用对曲面的面积积分解题,但积不出来,所以实际考察的是多元函数极值,截面是一个椭圆,点到原点距离的最大值和最小值分别是长半轴长和短半轴长
卷四4 7 18 19 20
$三重积分的先二后一法,重点消化$
卷五1
卷六18 22
卷七 ...

电路934疑难点
1.Y与Δ的相互转换
2.实际电源两种模型的相互转换 等效变换仅保证端子外部电路的电压,电流和功率相同,对内部并无等效可言
3.KCL和KVL 的独立方程数对于具有$b$条支路和$n$个结点的电路,根据KCL可以列出$(n-1)$个独立方程,根据KVL可以列出$(b-n+1)$个独立方程
4.结点电压法的特殊情况1.无伴独立电压源:
以电压源的一端连接点作为参考点,则关于另一端的节点电压已知
2.受控电流源:
作用可以看成是独立电流源但是需将控制量用节点电压表示
3.有伴受控电压源:
直接转换为等效受控电流源
4.无伴受控电压源:
以电压源的一端连接点作为参考点,则关于另一端的节点电压已知,控制量需用节点电压表示
5.叠加定理独立源置零时受控源仍应保留在各分电路中
6.戴维南定理和诺顿定理的两种使用方法使用对象是==一个含独立电源、线性电阻和受控源的一端口==
1.根据开路电压$u_{oc}$、短路电流的$i_{sc}$以及等 ...
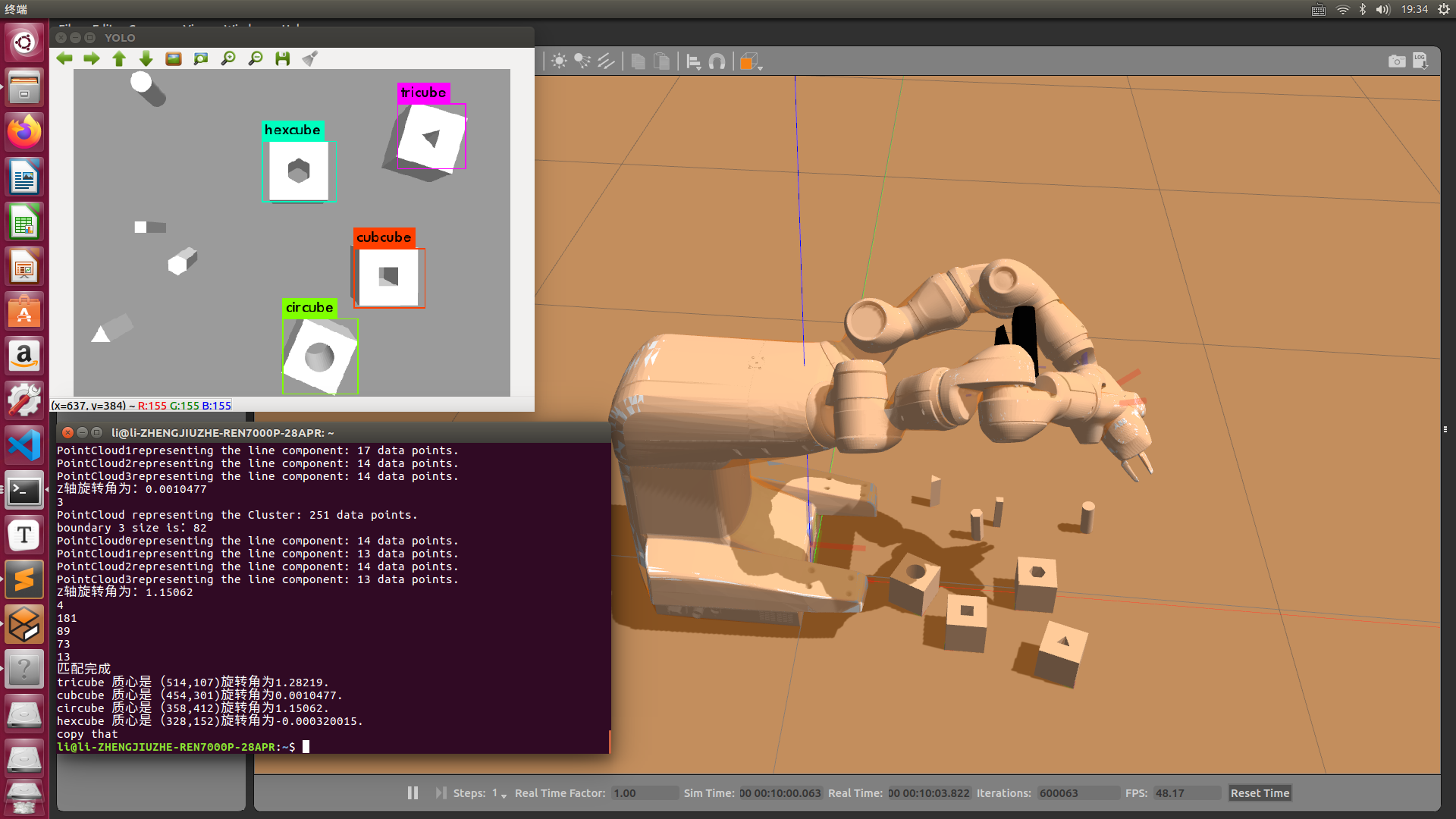
Gazebo下的双臂协作机器人的工件装配(三)基于点云和yolo
安装PCLPCL(Point Cloud Library)是在吸收了前人点云相关研究基础上建立起来的大型跨平台开源C++编程库,它实现了大量点云相关的通用算法和高效数据结构,涉及到点云获取、滤波、分割、配准、检索、特征提取、识别、追踪、曲面重建、可视化等。
具体安装过程不在赘述,大致安装过程如下:
1.安装各种依赖库
2.Qt4切换到Qt5
123qmake -vcd /usr/lib/x86_64-linux-gnu/qt-default/qtchoosersudo gedit default.conf
将里面的Qt4目录改为QT5的安装目录
3.通过编译源码安装VTK7.1.1,需要cmake gui
4.推荐直接通过命令行安装,通过源码安装依赖太多编译不容易通过
(通过命令行安装的PCL版本是1.7.2)
安装好后可以找个例程测试一下pcl visualizer能否正常显示
相关例程及cmakelist百度云:https://pan.baidu.com/s/1hZU0FzA3iyXTCS-AHXWS1Q
搭建环境该world在原来食品分类的基础上修改得到
工件STL模型百度云: ...
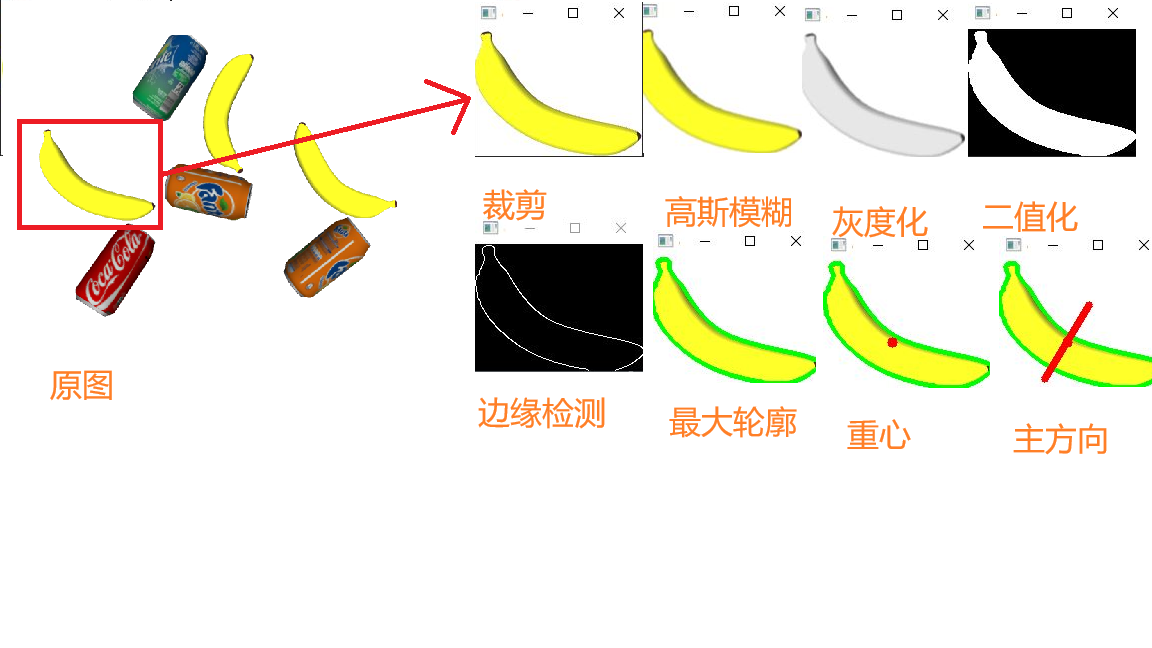
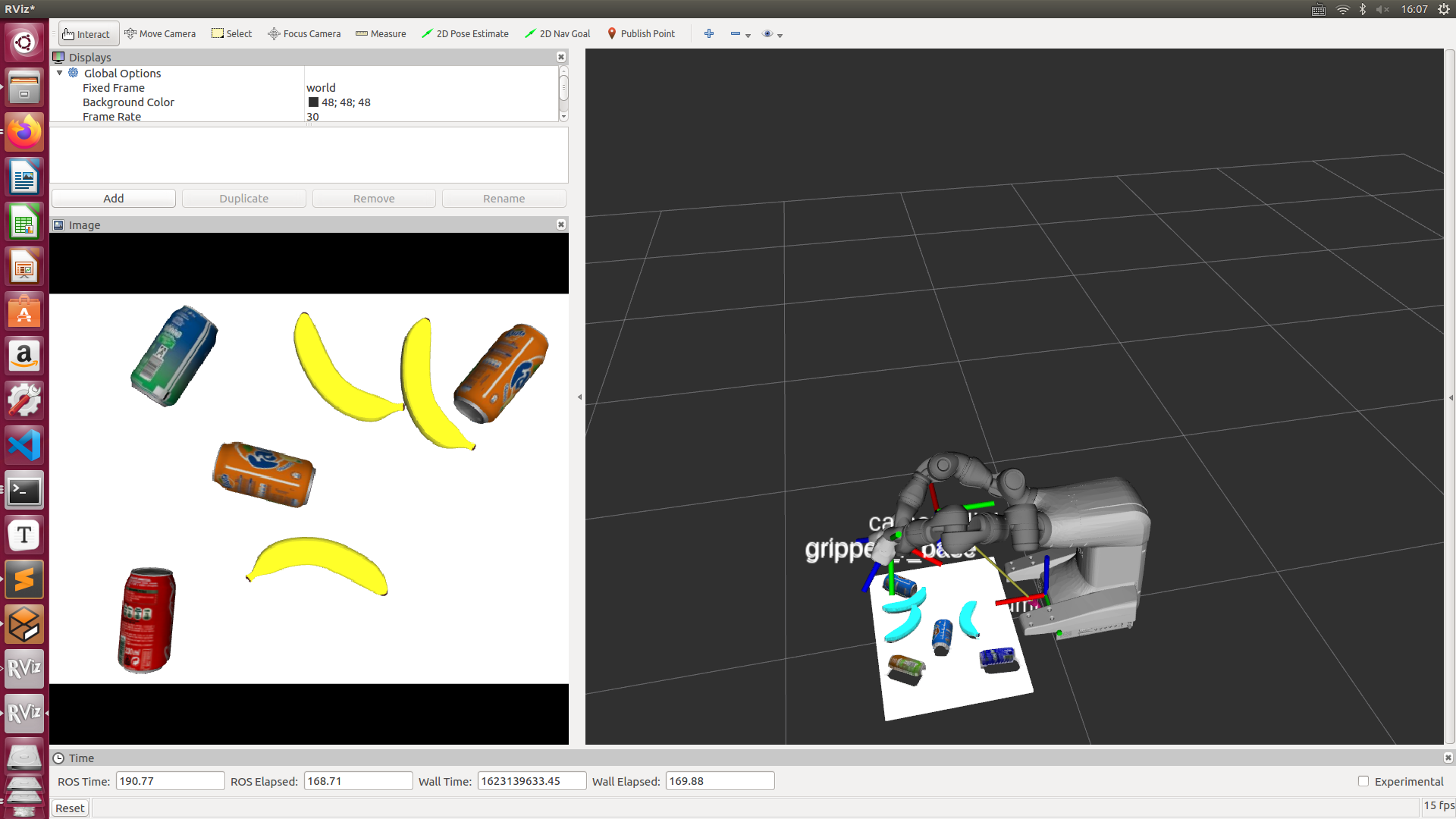
双臂协作机器人的食品分类抓取仿真(三)二维抓姿检测
效果演示
将yumi的功能模块和darknet_ros的检测模块整合到了一个工作空间,在原有食品检测分类的基础上实现了bounding boxes的获取以及抓姿的检测和发布历史遗留问题darknet_ros_msgs包中自定义了三种消息类型,如果和yumi的相关功能包处在不同的工作空间下yumi将无法法订阅这些自定义消息,因此必须想办法将工作空间重新整合在一起
1.为确保配置不受编译后的文件影响,在~/catkin_ws/src下新建darknet_ros文件夹先不要编译,重新将daknet_ros下的相关文件按上一篇博客配置好,原来的yolov3-tiny_5000.weights,ros.yaml,yolov3-tiny.yaml,yolov3-tiny.cfg,darknet_ros.launch,这些文件都要搬到当前的darknet_ros里面来
2.准备好这些后就可以开始编译了
12cd ~/catkin_wscatkin_make -DCATKIN_WHITELIST_PACKAGES=“darknet;darknet_ros;darknet_ros_msgs” -DC ...
双臂协作机器人的食品分类抓取仿真(二)yolov3-tiny食品检测与分类
Darknet ROS下的食品分类初期成果:
配置Darknet_ROS1.创建工作空间并下载darknet_ros根据Darknet ROS项目文档的介绍:
This is a ROS package developed for object detection in camera images. You only look once (YOLO) is a state-of-the-art, real-time object detection system. In the following ROS package you are able to use YOLO (V3) on GPU and CPU. The pre-trained model of the convolutional neural network is able to detect pre-trained classes including the data set from VOC and COCO, or you can also create a network with your own d ...
ROS Kinetic & Gazebo7下的ABB-Yumi双臂协作机器人的食品分类抓取仿真(一)联合仿真与环境搭建
项目简介
本项目原计划研究基于双臂机器人的物体插孔装配操作,这个问题是双臂机器人协作规划与双臂协调运动控制的关键问题。研究基于项目现有的物理仿真环境,在双臂机器人抓取到物体之后,规划双臂的运动轨迹,实现两个可相互装配物体的插孔操作。
但是经过仿真测试发现Gazebo对物理效果的仿真有缺陷,两个工件是否能成功装配很大程度上收工件尺寸,质量,惯量,材质,碰撞等参数以及逆运动学求解精度的影响,因此任务调整为结合Yolov3目标检测算法完成双臂的协作控制以及水果以及各种饮料的分类抓取
环境Linux: ubuntu 16.04+Ros Kinetic+Gazebo7+Rviz+MoveitSetupAssistants+Blender2.9.3+Yolov3
Gazebo和Moveit的联合仿真 ABB-Yumi是一款比较新型的双臂协助机器人,开源资源相当有限且很不完善,因此从零搭建仿真环境十分困难,同时联合仿真的相关资料基本上都是基于自己搭建的模型以及UR系列的单臂机器 ...

Ubuntu 16.04安装ROS Kinetic
起因 remove qt5时误删ROS,心态很崩,忍痛卸载重装ROS
12sudo apt-get purge ros-*sudo rm -rf /etc/ros
这时已成功卸载ROS
安装ROS Kinetic1.设置sources.list
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
2.设置key(公钥已更新)
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
3.更新package
sudo apt-get update
4.安装ROS kinetic完整版
sudo apt-get install ros-kinetic-desktop-ful ...

Ubuntu16.04安装cuda9.2,cudnn 7.6.3
安装Cuda 9.2由于驱动版本430,根据cuda官网要求可知下载9.2比较合适
https://developer.nvidia.com/cuda-toolkit-archive
下载cuda_9.2.148_396.37_linux.run
放到Home目录下
sudo bash cuda_9.2.148_396.37_linux.run
sudo source ~/.bashrc
添加到环境变量
export PATH=/usr/local/cuda-9.2/bin/:$PATH;export LD_LIBRARY_PATH=/usr/local/cuda-9.2/lib64/:$LD_LIBRARY_PATH;
除了不安装驱动,其它均选择y
之后通过 nvcc -V查看cuda是否成功安装
这里cuda 9.2已经成功安装!!!!!!
安装Cudnn7.6.3与Cuda9.2匹配的Cudnn库有7.6.3,所以这里到https://developer.nvidia.com/rdp/cudnn-archive
下载cudnn-9.2-linux-x64-v7.6.3.30. ...

各种工具的快捷键(持续更新)
Pycharm打开工程后Add Configuuration为灰色,Ctrl+Shift+F10
自动调整格式:Ctrl+Alt+L
labelImageCtrl + s 保存Ctrl + d Copy the current label and rect boxSpace 标记当前图片已标记 |w 创建一个矩形d 下一张图片a 上一张图片
SublimeText3注释:Ctrl+/
取消注释: Ctrl+Shift+L
缩进:Ctrl+]
前进:Ctrl+[

YOLOv5实现中医药软包装检测
运行环境windows10+Anaconda3+pytorch1.8+python3.8+pycharm
安装Anaconda1.访问Anaconda官网下载Anaconda3并按照安装程序引导完成安装
2.找到.condarc文件
将channels下的default项去掉
3.启动Anaconda Prompt
添加镜像源
1234567891011conda config --add channels https://mirrors.tuna.tsinghua.edu.cn/anaconda/pkgs/free/conda config --add channels https://mirrors.tuna.tsinghua.edu.cn/anaconda/cloud/conda-forge conda config --add channels https://mirrors.tuna.tsinghua.edu.cn/anaconda/cloud/msys2/conda config --add channels https://mirrors.ustc.edu.cn/an ...